DVLs with bottom-tracking algorithms that improve accuracy and reliability for subsea navigation
- Perspectives
Applications requiring subsea navigation range from diver-held guidance systems for special operations to large, autonomous underwater vehicles conducting high-accuracy bottom surveys over long distances.
It is important to ensure that velocity estimates for subsea navigation do not have any bias or offsets, because this will lead to a growing error in the position estimate. This is where the Doppler Velocity Log (DVL) becomes a key part of subsea navigation: it offers an accurate estimate of velocity with zero-mean bias.
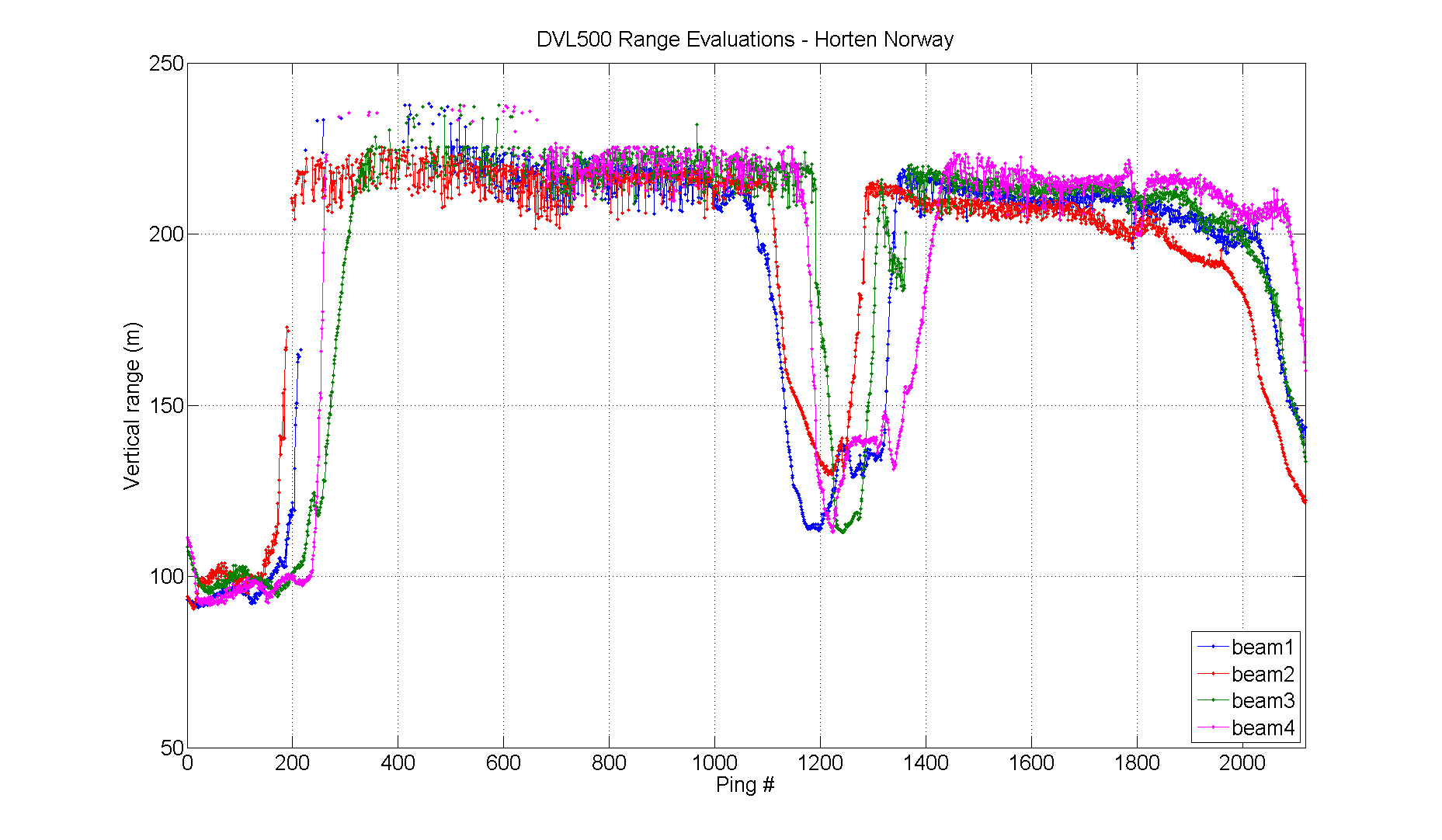
Data plot of the bottom-track capacity of an advanced DVL from Nortek.
Estimating velocity relative to the sea bottom with greater accuracy
A Doppler Velocity Log (DVL) is an acoustic sensor that estimates velocity relative to the sea bottom. This is achieved by sending a long pulse along a minimum of three acoustic beams, each pointing in a different direction.
Typically, this produces estimates of velocity converted into an XYZ coordinate frame of reference – the DVL’s frame of reference. Together with a heading estimate, these velocity estimates may be integrated over the ping interval to estimate a step-by-step change of position – i.e. displacement = velocity × time step.
The Nortek DVL utilizes proprietary bottom-tracking algorithms that improve accuracy and reliability in challenging environments.
Test of Nortek DVL shows a 10 percent performance beyond specification
The data seen above are the simple range estimates of a DVL500’s bottom track, as the test vessel crosses the Oslofjord in Norway. The horizontal axis is ping number. Beams 1 and 2 point forward (45 degrees off the forward-pointing axis), while beams 3 and 4 are pointed to the aft quarters.
The Oslofjord offers a unique testing environment, with its steeply sloping bottoms and generally complex terrain. In this particular test, we can see that the vehicle quickly transitions over slopes that change altitude from 100 m to 220 m within a few pings. Thanks to the Nortek DVL’s proprietary bottom-tracking algorithm, the vehicle is able to maintain accurate bottom lock. This provides reliable navigation data over complex sloping bottoms when the beams are exposed to extreme grazing angles and low signal-to-noise ratios.
Reducing risk with accurate and proven subsea technology
With only 5 percent of the world’s oceans mapped, there are an immense number of unknowns when deploying and operating a subsea vehicle. Fortunately, the reliability and performance of the Nortek DVL bottom track gives customers confidence in their navigation solution. With industry-leading DVL technology, subsea operators and developers can navigate unknowns and safely conduct subsea missions.
Read our in-depth guide to subsea navigation here.
Nortek’s proprietary bottom-tracking algorithms for DVLs improve accuracy and reliability for subsea navigation solutions.