Nortek redefines current profiling from autonomous vehicles
- Company & product news
Adapting any equipment for use on USVs and ASVs can be complicated and time-consuming. It needs to fit into a tight space, work with the limited on-board diesel or battery power supply and, ideally, run software enabling usable data to be transferred to and from remote operators, even when far out at sea.
The challenges of operating ADCPs on autonomous vehicles
Older ADCPs can be particularly troublesome to install, as they tend to be heavy, bulky, power-hungry instruments, designed to be mounted on much larger vessels than unmanned vehicles. Customers often have to rely on their own ingenuity to come up with a satisfactory mounting solution, if they can find one at all.
But the problems don’t stop there. Data transfer is a headache. Conventional ADCP software is primarily designed to record entire data streams to the vessel’s hard drive for retrieval at the end of the mission, or send that data via relatively wide-bandwidth links, such as Wi-Fi. That may be fine for short trips, close to shore, but it’s no good if you want to monitor operations remotely over days and weeks when an ASV is far out at sea. Raw data streams are much too large to be transmitted over the limited-bandwidth connections available in remote locations, such as long-range radio links or the Iridium satellite network.
To make matters worse, older ADCPs are often unable to make the most of what data is available. They do not have the necessary internal motion sensors and software needed to compensate for the erratic movement of unstable USVs and ASVs, they produce less accurate data because they ping less frequently, and they do not have optimal time synchronization with external sensors.
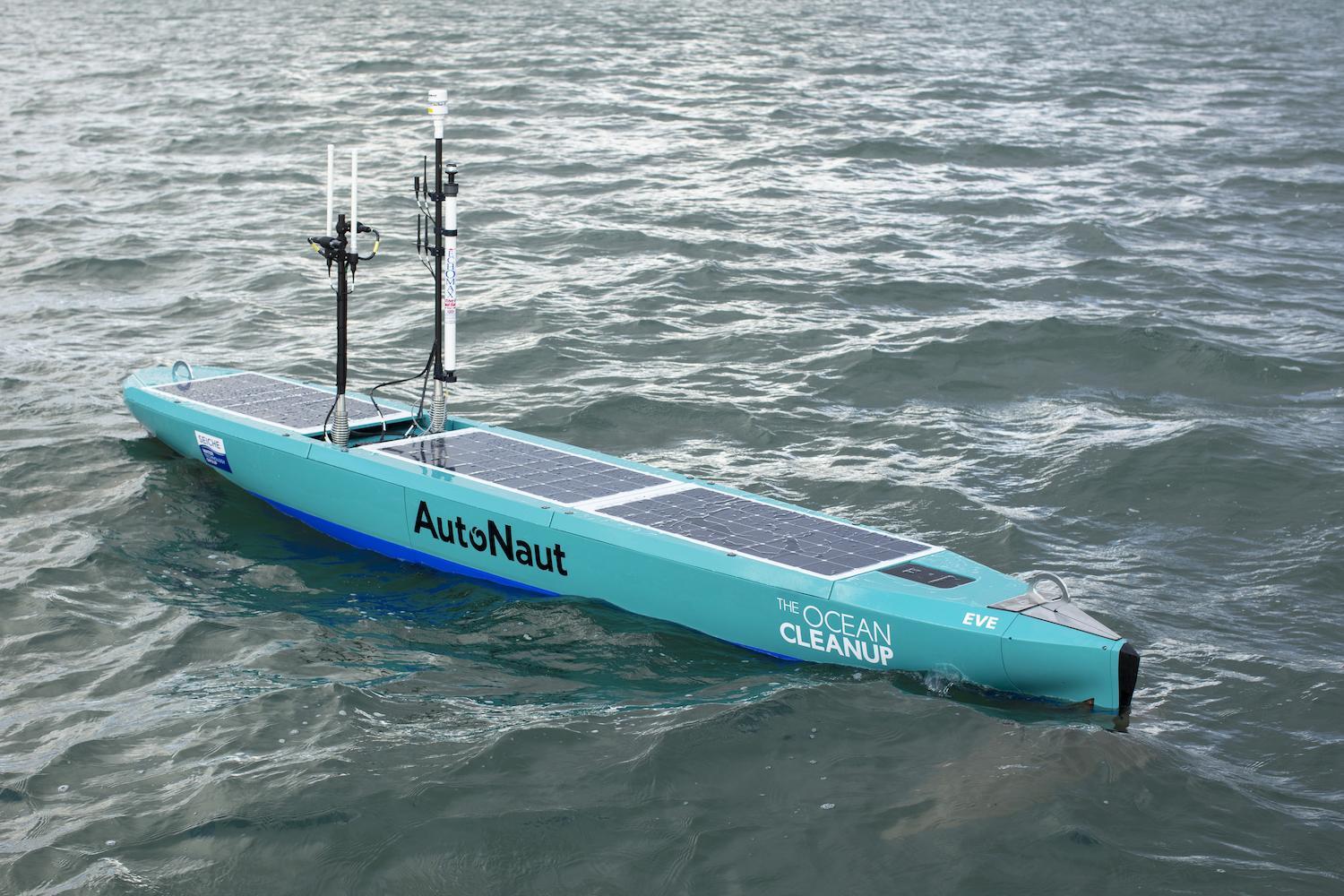
Figure 1: The Autonaut 5.0 USV equipped with the 1000 kHz version of Nortek’s Signature VM system to obtain data in close proximity to a device that removes plastic from the ocean. The USV is also used to monitor the background current in the far field of the device.
Nortek’s Signature VM ADCP system, with its pioneering Signature VM Service software package, is designed to overcome these problems for anyone needing to obtain accurate profiles of current speeds and directions at multiple depths. Oceanographic institutes, universities, commercial geoscience companies, port authorities, the military and ocean clean-up teams (Figure 1) are just a few of the customers that would feel the benefits.

Figure 2: Nortek China’s USV equipped with the Signature VM system and the Signature Service software for USVs and ASVs to measure water current and direction. The software uses limited processing power and doesn’t require a dedicated PC. It can create compact files that can be sent using long-distance telemetry solutions.
A current profiling system that is easy to install, with a small footprint
Optimized and proven through collaborative tests with leading USV and ASV suppliers, the equipment can be installed easily, even by those with limited knowledge of the technology, without resorting to complex logistical solutions (figure 2).
The Signature VM is compact and much lighter than some of the older ADCPs on the market, making it easier to mount. The well-thought-out design maximizes overall ADCP performance, while keeping the number of components to the minimum required. Power consumption is around half that of older-generation ADCPs. The Signature VM’s ability to operate concurrently as an altimeter (depth measurement – distance to seabed) and echosounder means customers can save space on board by having one instrument instead of two. (The echosounder makes a vertical scattering profile through the water column.)
There are no compromises on performance. The instrument can make high-resolution, long-range profiles, despite its small body. The Signature VM also pings (or samples) faster than its rivals, thus providing more data to filter.
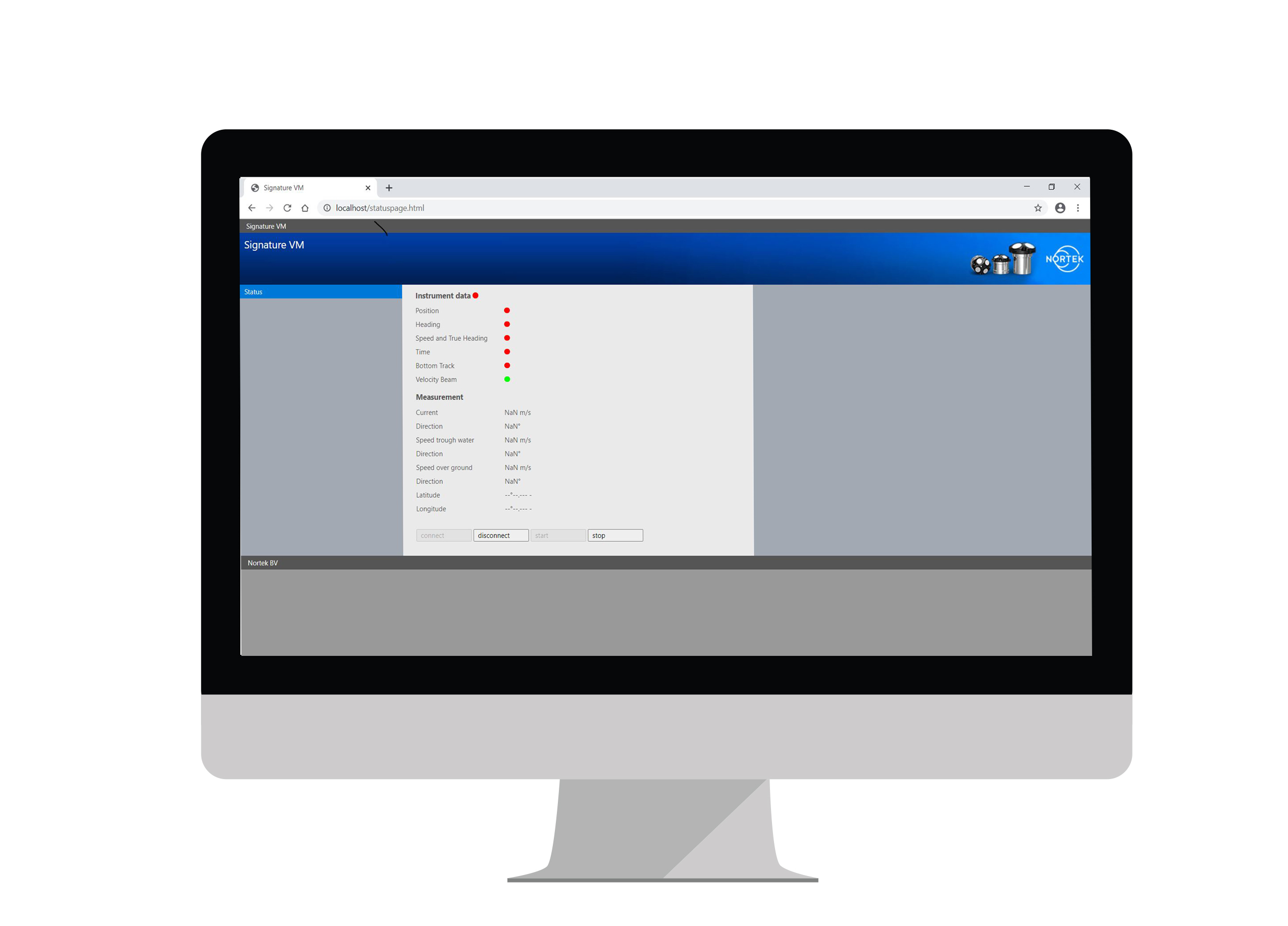
Figure 3

Figures 3 and 4: Signature VM USV Service software can be configured manually using a web interface (top – figure 3) or automated via Telnet commands (bottom – figure 4) using third-party software. The software runs as a Windows service in the background and is automatically restarted when the vessel’s computer is rebooted.
This is an ADCP system optimized to operate from small platforms such as USVs and ASVs that experience high-frequency motion. Optional attitude and heading reference system (AHRS) motion data is available for every ping, providing corrections for tilt and roll.
To cut down on the need to fit further external instruments, the ADCP also comes with an integrated Global Navigation Satellite System (GNSS). This provides a reliable non-magnetic heading, even when the vessel is not moving, as well as speed and direction when the sea is too deep to allow bottom-tracking. The built-in time server ensures the Ethernet-based instruments and PC remain in sync.
Unique software gathering high-quality data
An instrument’s ability to gather high-quality data is of limited use if operators cannot monitor the results during the assignment, and it is here that the Signature VM Service software (available upon request) that controls the Signature VM comes into its own.
ADCPs on USVs and ASVs working in remote locations need reliable and accurate software that is able to process data files that are large enough to be of use to operators, but small enough to be transmitted reliably via the narrow bandwidth of long-range radio or Iridium links.
Nortek’s Signature Service software still stores all the raw data from the instrument on the hard drive, which can be downloaded when the vessel returns to shore. But it is also able to take averages of this data, based on adjustable time intervals. These can then be saved as text files that are small enough to be reliably transmitted while out at sea. That invaluable function means operators can check that the instrument is functioning properly and is providing usable data during the assignment.
All possible outputs or ADCP settings and offsets can be set via commands using the Telnet communications protocol, a web interface or other third-party software, which work over narrow bandwidths (figure 3). Processor use and power consumption is low, leaving operators with more room for other applications in the vehicle’s PC.
Despite this, it retains the same functionality as software consuming more processing capacity and power, but without a graphical interface. It is a Windows service, which means it will run in the background on the vessel’s PC and will automatically restart when the computer reboots, minimizing the potential for operational interruptions.
Opening up new opportunities for USV and ASV users
The combination of Nortek’s Signature VM ADCP and Signature Service software provides USV and ASV users with the opportunity to overcome the limitations of older ADCP packages, by allowing real-time remote data monitoring, better compensation for vessel motion, lower power consumption and a reduction in the need for external sensors.
That all translates into more useful results and more efficient work programs, leading to better outcomes and, potentially, savings in both time and operational costs.