Student engineering team integrates Nortek’s new Nucleus1000 navigation sensor on AUV
- Company & product news
A team of engineers at the Norwegian University of Science and Technology (NTNU) set out each year to create an autonomous underwater vehicle (AUV) that enables them to gain skills in the subsea vehicle space and participate in competitions. The Vortex NTNU team have previously used Nortek’s DVL1000 to assist in navigation of their subsea vehicle. This year, they used Nortek’s newest navigation and positioning instrument, the Nucleus1000, to benefit from its pre-synchronized, multi-sensor functionality.
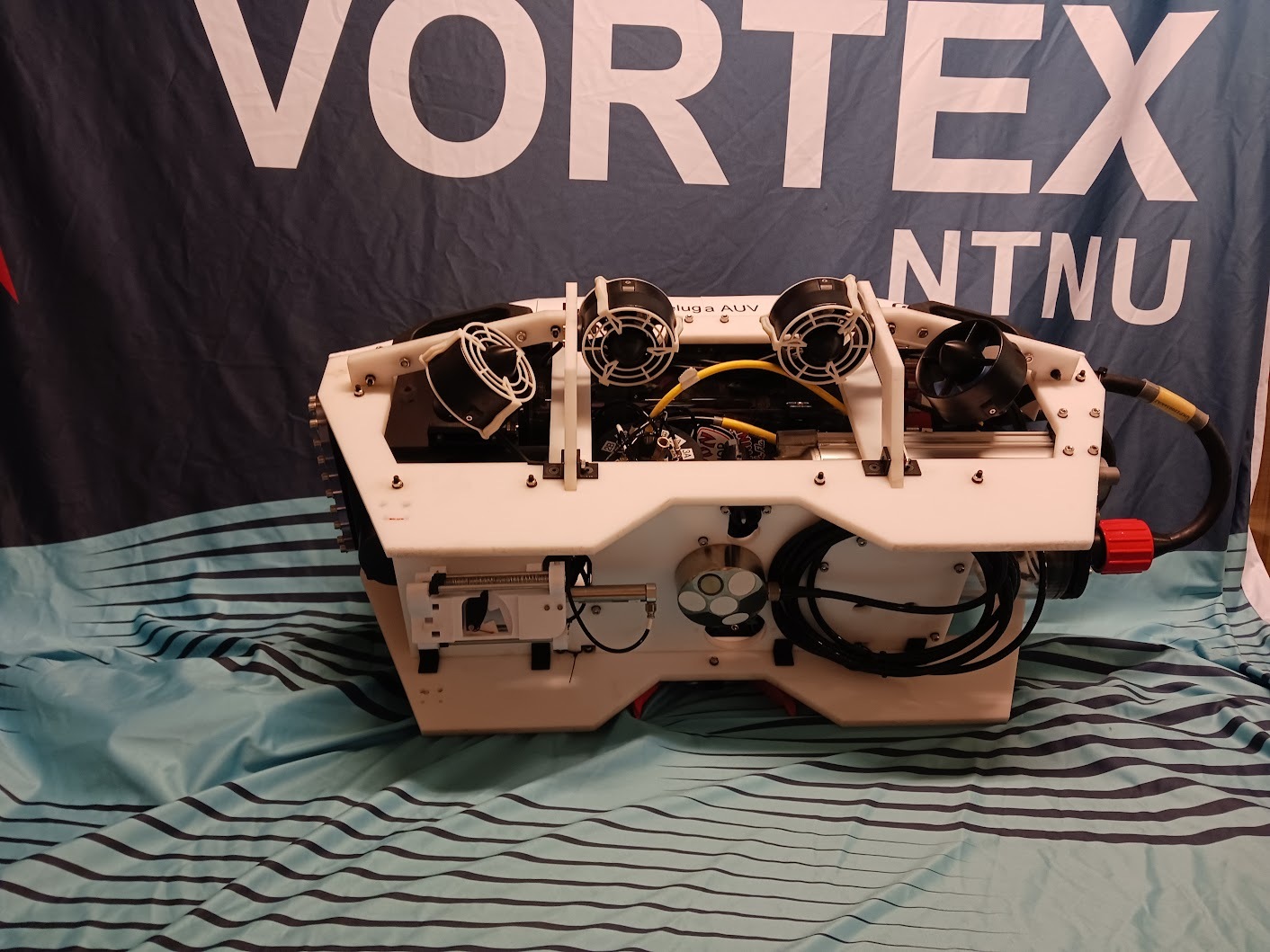
The small size of the Nucleus1000 gave the Vortex team at NTNU more freedom in the design of their new AUV.
Providing speed over ground and AHRS information for competitive AUV
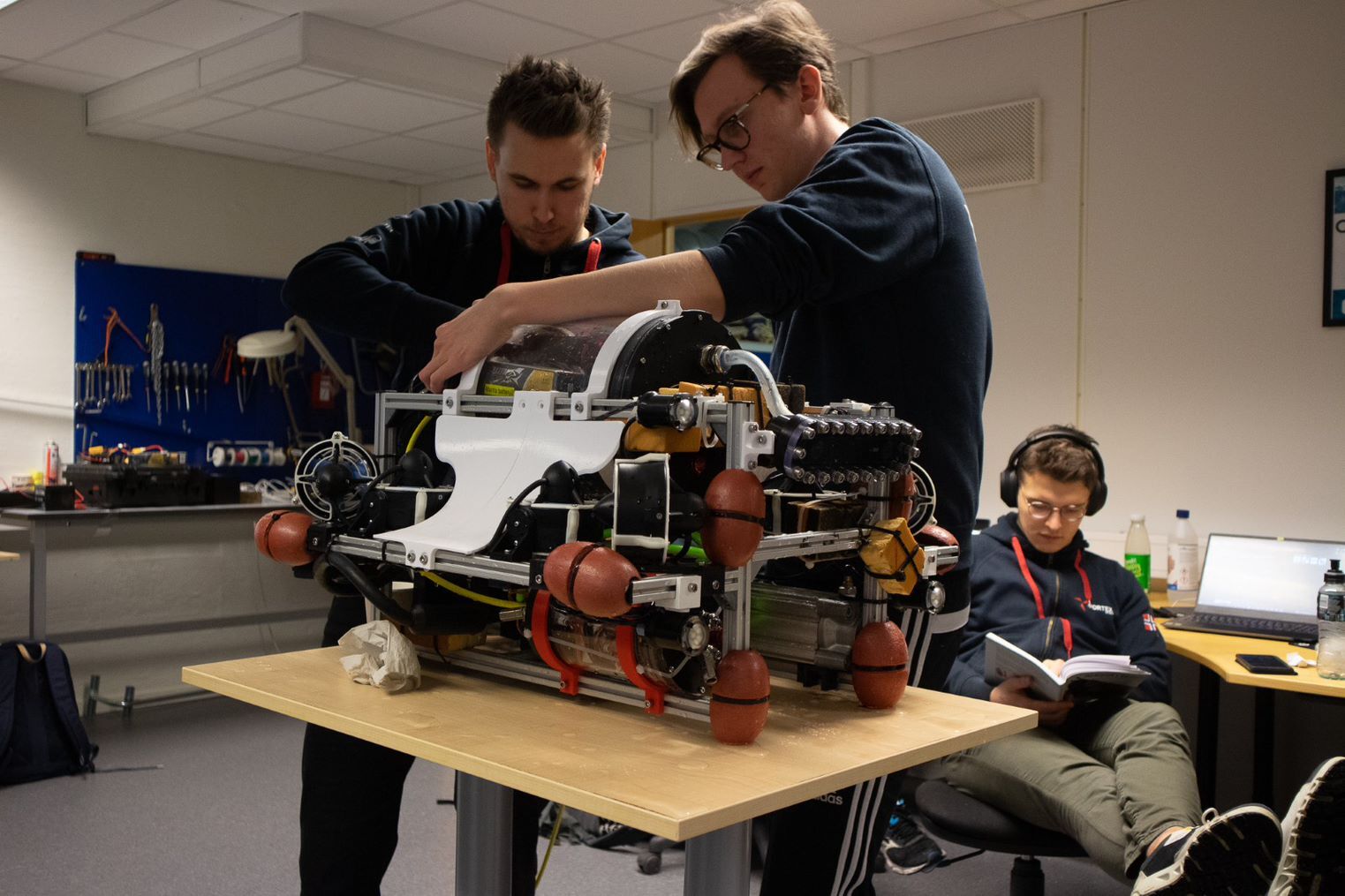
The team’s goals each year are to design and build vehicles, including AUVs, ASVs and ROVs, for use in global competitions. Competitions require vehicles to perform tasks in both pools and open waters, such as navigating through gates or locating objects. Vortex NTNU’s Beluga AUV was the first vehicle they developed with autonomy in mind from the outset. The team used the Nucleus1000 for control of their Beluga Mk2 vehicle during this year’s Robosub competition, providing speed over ground and AHRS information (such as pitch and roll).
Multi-sensor functionality and compact size simplifies AUV autonomy
The Nucleus1000 proved useful to the Vortex NTNU team in their quest for autonomy thanks to its compact size and multi-sensor functionality.
“The sensor rig makes up the backbone of autonomous operations, and a lot of time went into navigation and localization. These efforts were made a lot easier with the Nucleus, since it gives filtered measurements of depth and orientation out of the box, on top of the velocity measurements we had before,” says Christopher Strøm, the 2022 team’s technical lead in software.
According to Strøm, the small size of the Nucleus1000 gave the hardware team more freedom in the design of the AUV, while still adhering to the strict size and weight requirements.
“This new instrument is a lot sleeker… We’ve packed a lot more in a compact space,” he says.
Strøm also noted how the small blanking distance of the Nucleus1000 was beneficial, allowing their vehicle to operate close to the bottom of the pool. According to Strøm, the team additionally found the real-time feedback of the Nucleus’s user interface helpful for “sanity checking” during operation.
“Seeing a 3D model of the sensor actually laid out how you’d expect it to be was great,” he says.
The Vortex NTNU team will continue to build vehicles and compete worldwide.
The Vortex NTNU team previously used Nortek's DVL1000 onboard their AUV, but the small size and multi-sensor functionality of the Nucleus1000 proved better for their competition needs.
The Beluga Mk2 AUV was fitted with the Nucleus1000 for control of the Vortex team’s vehicle during this year’s Robosub competition.