 Rory Findlay
Rory Findlay
USV navigation in GNSS-denied environments made possible by tailor-made Nortek DVL
- Perspectives
The rise of uncrewed surface vessels
The past decade has marked a turning point in maritime technology with the rapid rise of Uncrewed Surface Vessels (USVs). These uncrewed platforms, often called “sea drones,” are redefining how we monitor, map, and secure the world’s oceans. Among their key advantages is the ability to perform tasks and surveys at a far smaller expense and risk than traditional crewed vessels. USVs are often used in applications including environmental monitoring, offshore inspection, subsea infrastructure protection, and defense missions such as Intelligence, Surveillance, and Reconnaissance (ISR).
GNSS: a vulnerable source of navigation information
USV technology does not come without challenges. USVs require reliable navigation and positioning information, particularly when performing autonomous operations. This information typically comes from GNSS. However, when USVs operate in defense scenarios or near contested maritime areas, GNSS information can be purposefully interfered with or encounter environmental obstructions.
USV operators are therefore increasingly focused on building redundancy into navigation systems to safeguard against unplanned outages or degradation. These outages can occur from environmental factors, such as solar flares, or from operating under infrastructure that can block GNSS reception, such as bridges. Purposeful GNSS interference typically comes in the form of jamming or spoofing, where signals are disrupted or falsified. This has become a growing concern, particularly in regions where geopolitical tensions create incentives for deliberate signal disruption, underscoring the importance of reliable backup navigation sensors when GNSS is lost.

Creating a resilient USV navigation system
USV operators are turning to alternative sensors which can provide the vessel with positioning information during GNSS outages. Without GNSS, a sole Inertial Navigation System (INS) on a vessel quickly drifts outside of acceptable levels when performing dead-reckoning navigation. By adding a Doppler Velocity Log (DVL) to the USV, operators unlock the ability to perform long-distance, dead-reckoning-based positioning with much lower drift.
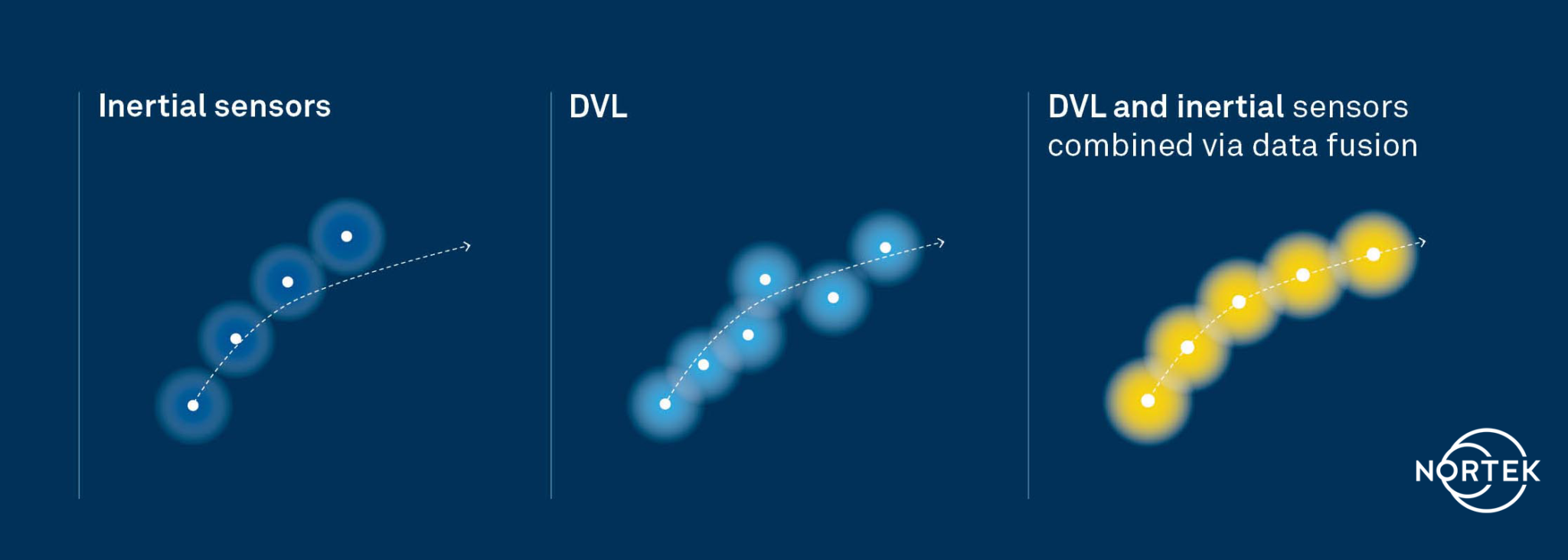
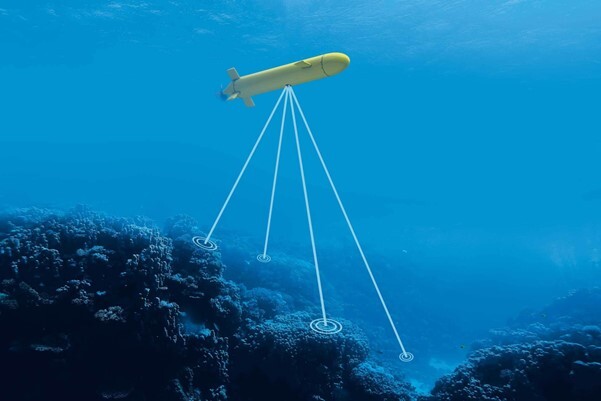
DVLs are key sensors typically used in subsea navigation systems which provide vehicle velocity information using acoustic returns from the seabed. Because DVLs offer an accurate velocity estimate with no drift, combining a DVL with an INS constrains the drift that would accumulate with an INS alone. Using a DVL allows USVs to maintain position or even navigate without requiring GNSS information, enabling fully autonomous navigation independent of potentially vulnerable signals.
However, deploying DVLs on surface vessels introduces its own set of engineering and operational challenges. Conventional DVLs typically feature protruding transducer heads that are not flush with a vessel’s hull. This is particularly challenging on smaller or high-speed vessels, where hull shape and turbulence can interfere with acoustic performance.

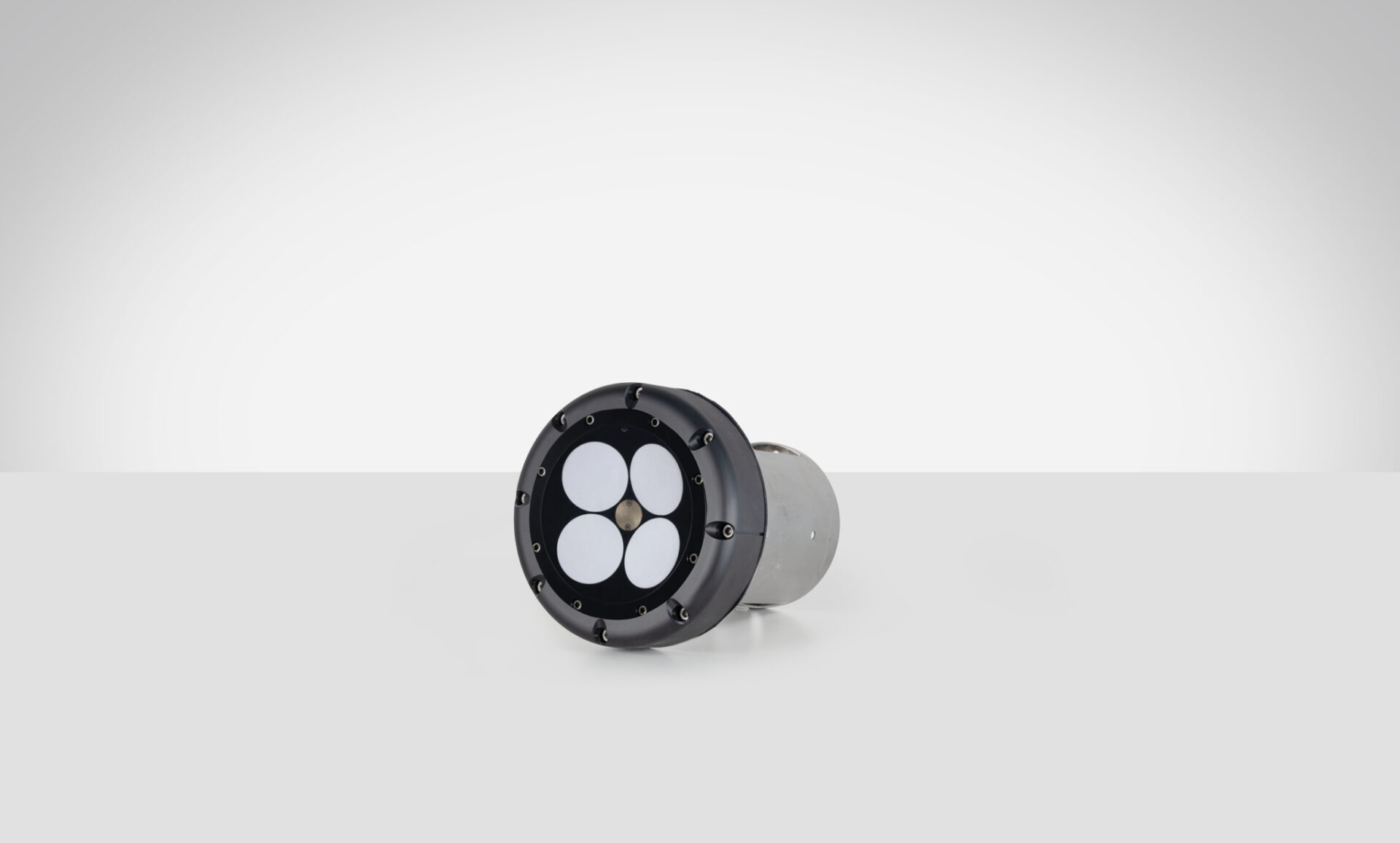
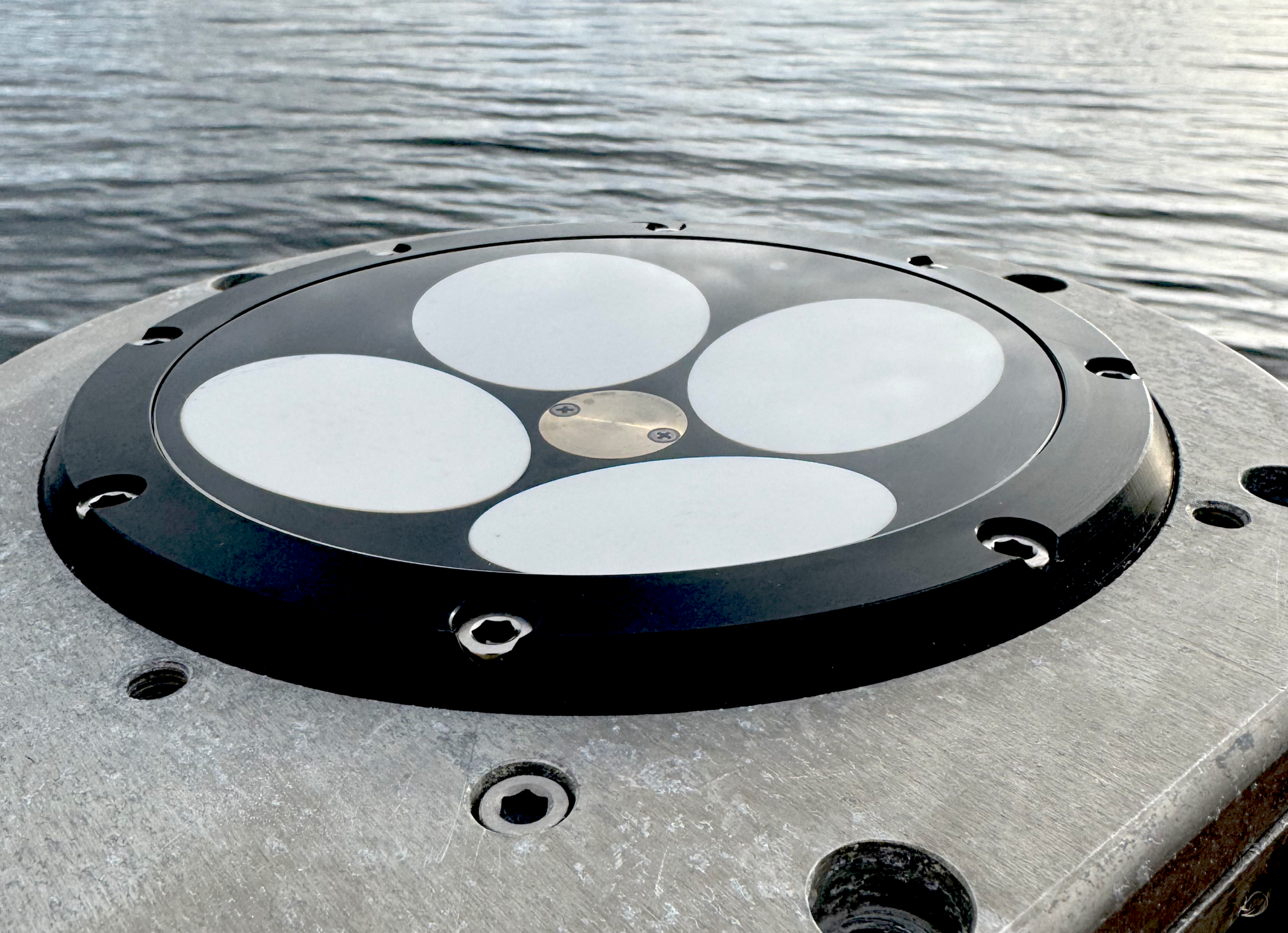
A tailor-made solution: the DVL 333 Surface
To meet these challenges, Nortek has created the DVL 333 Surface: a compact DVL designed for flush-hull installation, minimizing drag and protrusion below the hull line. The unique design of this product features a concave, fluid-filled transducer cavity sealed with an acoustic window. This allows for full control of sound velocity which eliminates the need for a hull-mounted speed of sound sensor.
When paired with a high-grade INS, the DVL 333 Surface delivers accurate position updates even during GNSS outages or interference. Its 300-meter bottom-track range supports fully autonomous operation in coastal waters, while a water-track mode extends functionality in deeper environments where the bottom is out of range. For improved situational awareness, the DVL333 Surface can also be upgraded to Nortek's VM Operations vessel-mounted ADCP system. For ease of maintenance, an optional type-certified sea valve allows in-water servicing without dry-docking.
Validating capabilities in challenging field settings
The capabilities of the DVL 333 Surface were demonstrated during field trials in the Oslofjord. The test site presented conditions representative of complex coastal environments, where depth can vary significantly over short distances, and the seabed composition ranges from soft sediment to rock. Unlike uniform test sites with flat, sandy bottoms, the Oslofjord provides a realistic proving ground for challenging navigation scenarios.
“Our goal was to demonstrate that a surface vessel can maintain precise positional accuracy even during a complete GNSS blackout, and to do so in truly challenging coastal conditions,” said Torstein Pedersen, Product Manager for Doppler Velocity Logs at Nortek.
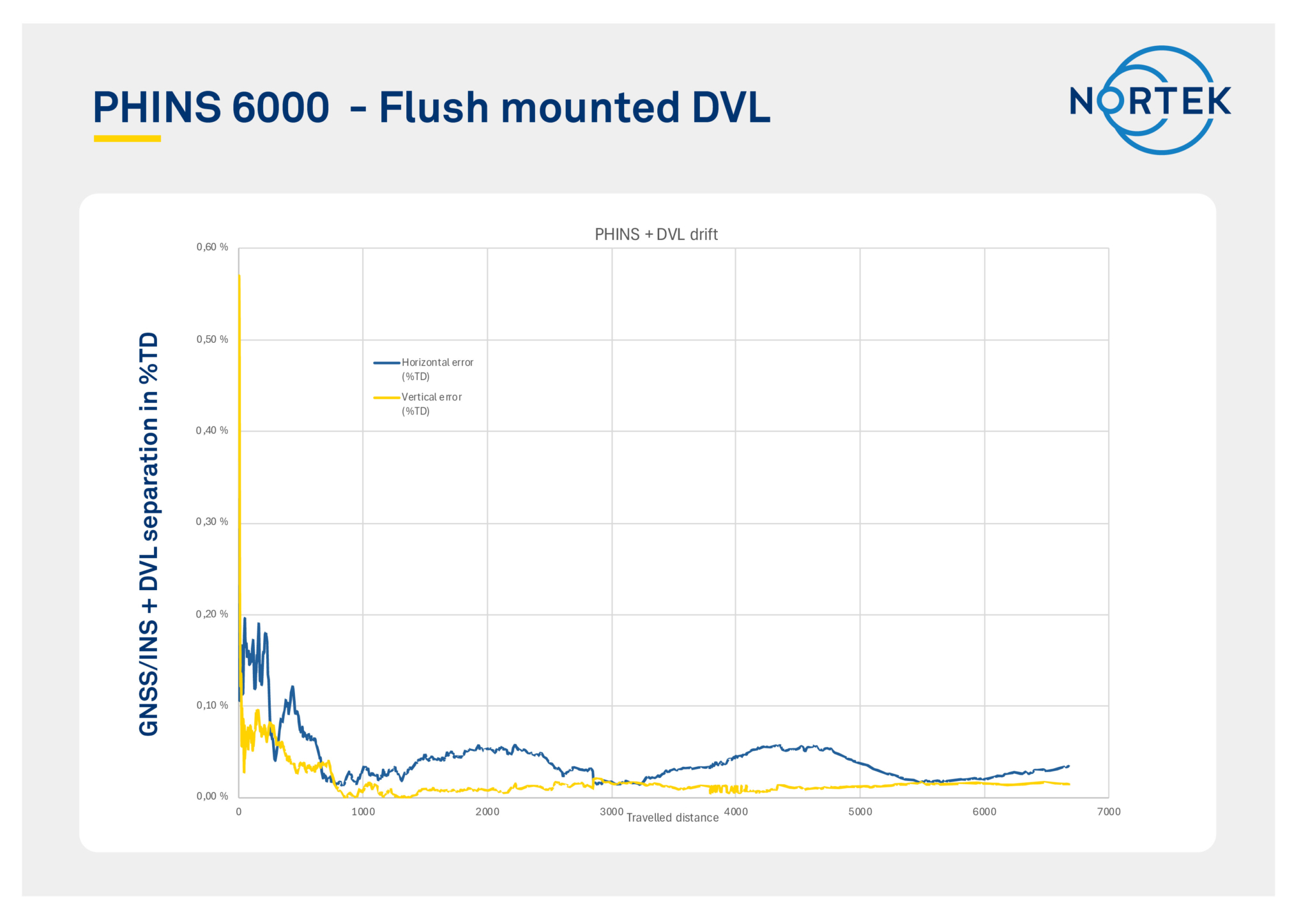
The navigation tests were carried out using a DVL 333 Surface integrated with an Exail PHINS 6000 INS. Although the trial track was relatively short, the system’s performance quickly stabilized, achieving a stable, long-term accuracy of approximately 0.05% of distance traveled (i.e., 50 cm error each 1 km traveled). When Bottom track was disabled (simulating operation outside of the DVL 333 Surface’s 300 m bottom track range) and only Water Track was used with the PHINS INS, the horizontal position error remained within 8 meters over a three-hour run, with the DVL operating solely in water-track mode. In this mode the INS estimates background currents, which were accurately estimated as weak, stationary currents.
“We were particularly impressed with the performance of the system when using just water track mode,” says Pedersen. “The Exail INS was able to use the water track information to estimate currents and correct for them in the navigation, which is not an easy task to do with accuracy over extended periods. This performance is critical for open water navigation,” he added.
These results confirm that the DVL 333 Surface delivers reliable navigation performance in variable bottom conditions and without a direct speed-of-sound measurement. More importantly, they demonstrate the availability of a commercially available DVL that overcomes the challenges typically faced when adapting subsurface systems for surface platforms.
As uncrewed technologies expand into more demanding environments, sensors like the DVL 333 Surface are becoming critical to ensuring reliable, independent navigation; keeping autonomy on course, even when GNSS is not. With the DVL 333 Surface, Nortek delivers the precision and resilience required for the next generation of maritime autonomy.