
Learning from nature with bionic engineering and using DVLs to improve subsea vehicles
- User stories
Synopsis
Challenge
EvoLogics AUVs, inspired by the form and motion of marine animals like manta rays and penguins, required high navigational accuracy to ensure optimum maneuverability.
Solution
Nortek provided EvoLogics with OEM DVLs, which were integrated into their lifelike vehicles.
Benefit
The AUVs can move dynamically when using a highly accurate navigation and positioning system, making them suitable for unusual subsea environments where traditional AUVs struggle.
Marine creatures have much to teach us about how to move around underwater. They are, after all, the specialists in this field and have been doing it for a lot longer than humans!
Berlin-based subsea technology company EvoLogics has tapped into this wealth of natural expertise to develop prototype bionic autonomous underwater vehicles (AUVs), based on the movement of some of the world’s most agile and energy-efficient swimmers, particularly manta rays and penguins.
The company’s main business is solutions for underwater communication, positioning, navigation and monitoring, as well as an autonomous surface vehicle for survey and support operations.
So far their team, which consists of experts in underwater acoustics and bionic engineering, has developed three underwater robot prototypes – Manta Ray, Poggy and PingGuin – as part of multi-organizational research and development (R&D) programs.
Boosting the accuracy of AUV navigation
The EvoLogics team has used Nortek DVLs to boost the navigational accuracy of its AUVs – and the company even took inspiration from another Nortek instrument in the early stages of the development process.
“The story actually goes way back. In early 2013, one of our robotic team leads read an article about the AD2CP Glider built by Nortek. He was impressed with the small size and low power consumption of the AD2CP, so he got in touch with Nortek to find out more,” says Eugen Olenew, team lead at EvoLogics Mechanical Engineering.
“The Nortek DVL was just in development back then, and EvoLogics eventually became one of the early-bird users. We received four prototype OEM DVLs that we built housings for and integrated with our systems. Due to our long-standing relationship with Nortek, their DVLs have been the first and obvious choice for our AUV projects ever since,” he adds.
Developing a highly maneuverable Manta Ray AUV
The BOSS Manta Ray project, a collaborative project led by EvoLogics and backed by the German government, got underway in 2013. It showed that a bionics-based propulsion system modeled on the flexible wings and tail of a manta ray could enable an instrument-laden AUV to navigate the water column, using its depth, roll, pitch and heading control.
The large wing surface provided the vehicle with excellent dynamic depth control capabilities, and made it highly maneuverable, as well as very energy-efficient. The wings also enabled the robot to perform well close to uneven seafloors, such as those covered in coral reefs – environments where traditional torpedo-shaped AUVs sometimes struggle to navigate accurately.
“One of the core technologies behind our Manta Ray and Poggy AUVs is the ‘Fin Ray Effect’, a bionic implementation of the biomechanical principle found in fish fins. The resulting construction allows us to build light and flexible shape-adaptive wing profiles and flow control devices,” Olenew says.
Click to see this video on the BOSS Manta Ray AUV – a stunningly lifelike subsea robot for automated monitoring.
Integrated navigation system for AUVs for complex real-time sea surveying
The team built on its experience with Manta Ray and the Fin Ray Effect to create Poggy, a prototype vehicle developed for Bonus Seamount, another collaborative project.
Seamount aims to develop innovative AUVs and integrated sensor systems for complex real-time sea surveying, analysis and monitoring, and then apply these in the study of submarine groundwater discharge in the Baltic Sea.
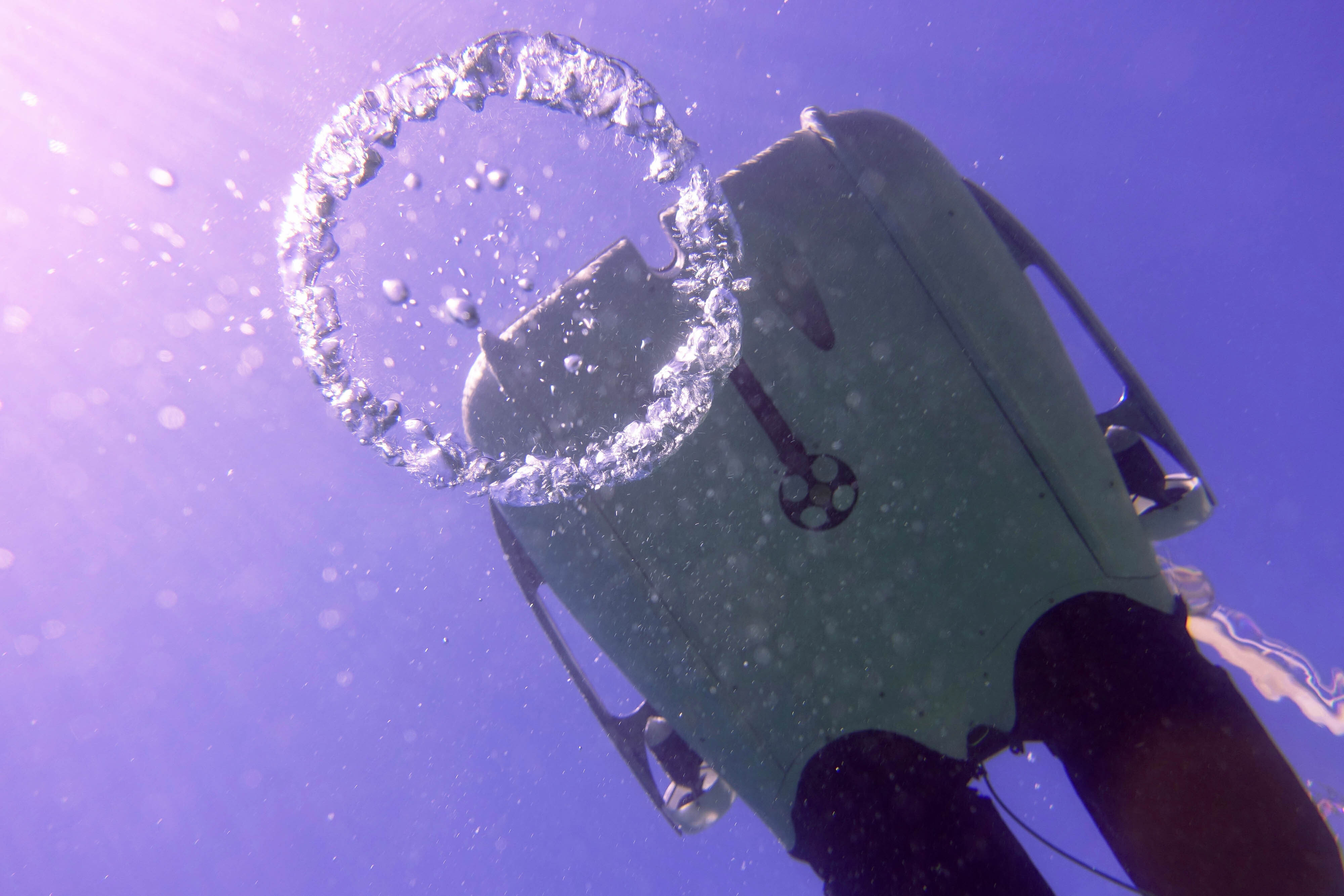
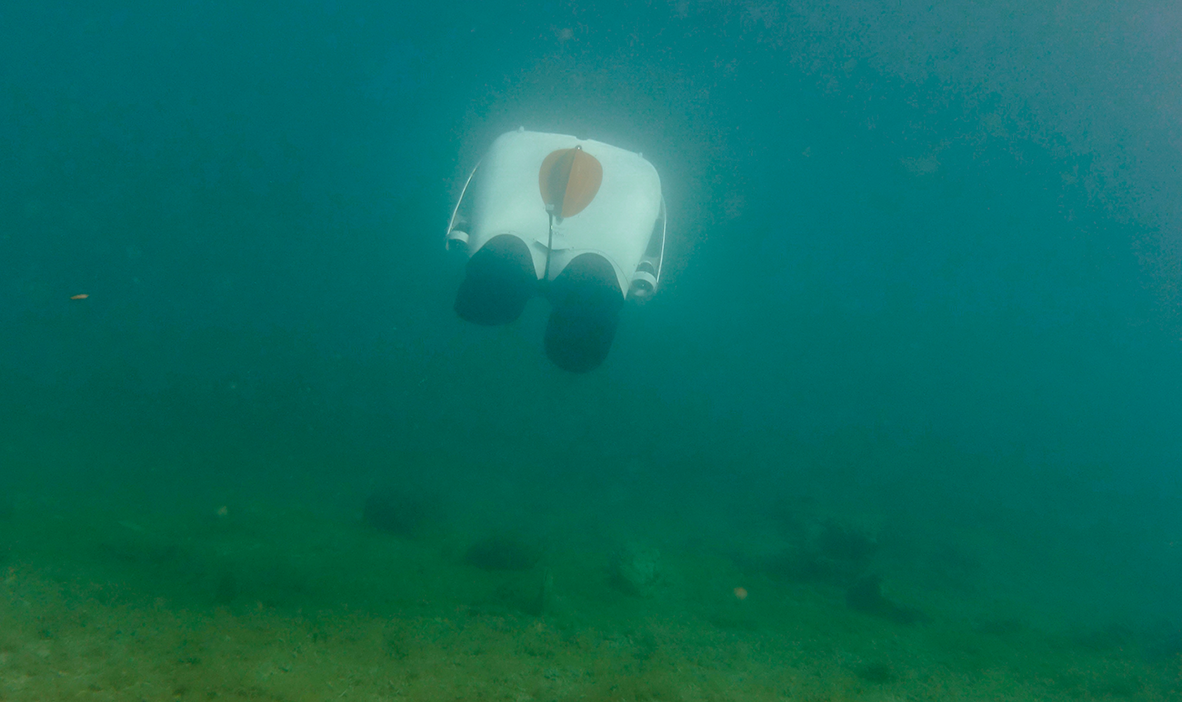
Poggy loses the wings of Manta Ray but comes with two Fin Ray tails providing a flexible rudder system, which EvoLogics says has hydrodynamic properties superior to those of static constructions.
Watch this video on the Poggy AUV from EvoLogics – a novel bionic robot for environmental subsea surveys.
Dual rudders give Poggy outstanding roll and pitch control in the whole water column, Olenew says. This enables dynamic climbs and dives, leveled gliding and bottom following, with the Nortek DVL 1000 helping to provide the high level of navigational accuracy required.
The robot is light and has greater shock absorption capacity compared to static designs – the rudder’s flexible design means it can withstand heavy impacts against a ship’s hull, for example. The company believes Fin Ray designs can be further improved to become significantly more efficient than a propeller.
Reliable and accurate navigational input for long-term subsea surveys
A different challenge was presented by the development of EvoLogics’ next prototype AUV, PingGuin, created for the Modular Underwater Mothership (MUM) project.
As part of the NaviMUM sub-project, EvoLogics was given the task of designing an AUV that could be deployed in a swarm of small vehicles, providing a sort of navigational task force to guide a larger modular instrument carrier, MUM, at the heart of the project. To do that, the swarm of AUVs need to be able to provide reliable and accurate navigational input throughout long-term exploratory missions, and to communicate with MUM, and each other, effectively. That means being able to function reliably for ten days at a time, so they need to be extremely energy-efficient, as well as being agile and able to provide accurate positioning data.
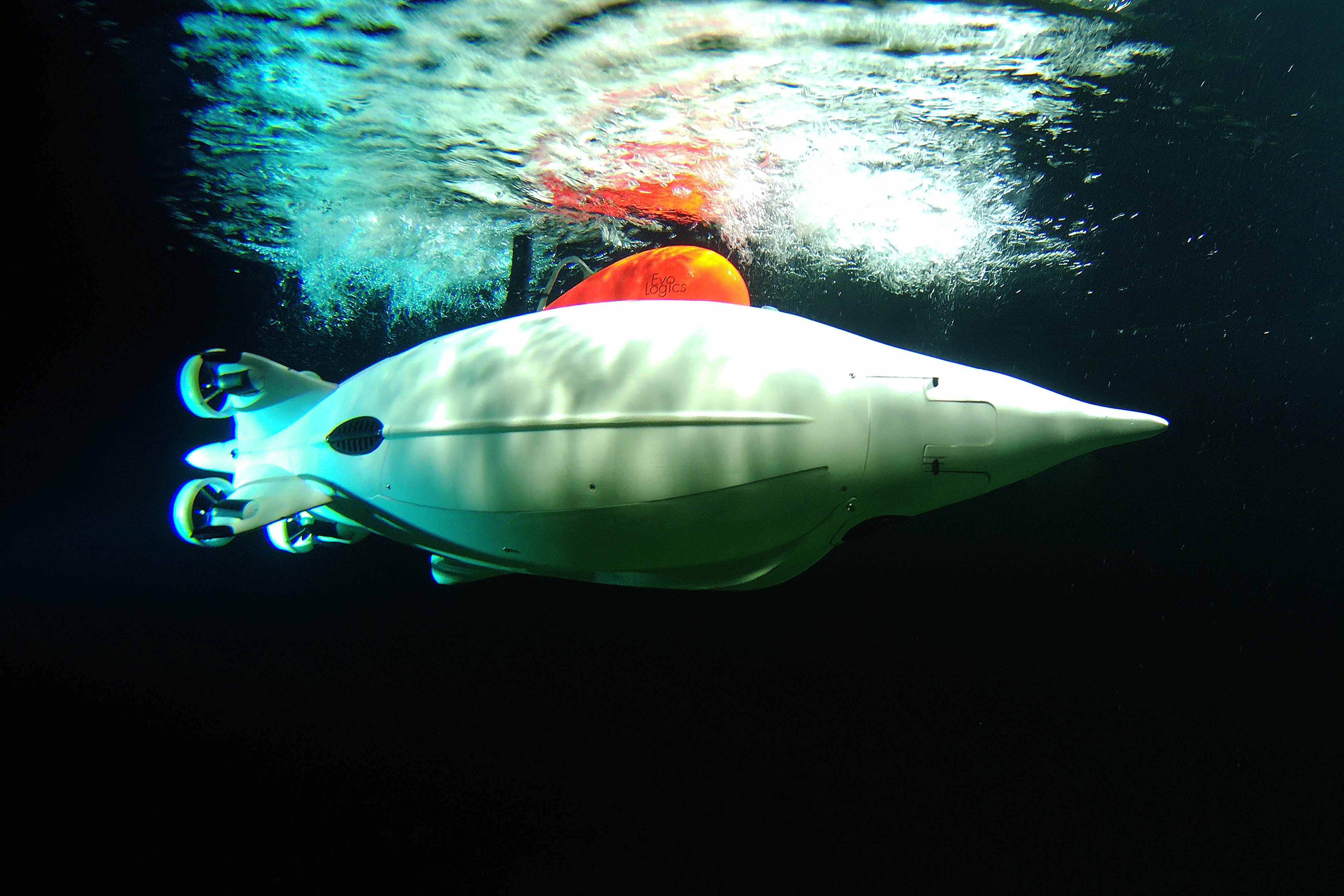
The vehicle built by the team maintained the shape and contours of an idealized penguin to maximize drag efficiency, with as few protruding parts as possible to affect its hydrodynamic performance. The result was PingGuin, which was first demonstrated in Kiel, Germany in June 2020. See it in operation here.
Powered by four horizontal thrusters and three vertical thrusters, each vehicle carries an EvoLogics ultra-short baseline (USBL) acoustic positioning modem and a surface communication module comprising Wi-Fi, radio and GNSS, with a collapsible antenna and an optional Iridium/GSM modem.
EvoLogics has installed the Nortek DVL 1000 Doppler Velocity Log on a PinGuin and is considering installing more of these navigation devices (or alternatively Nortek’s Nucleus 1000 instrument) in the future to ensure the positioning accuracy of the system.
The Nortek DVL in autonomous underwater vehicle navigation
A DVL makes accurate velocity measurements by analyzing the difference in frequency between acoustic pings sent from a transducer and the return signal bounced back to the transducer from particles in the water or the seabed. Using a formula based on the Doppler effect, the vehicle’s velocity relative to the water or bottom can then be calculated.
Click here for more on how Doppler technology is used for subsea navigation.
This means the DVL can help provide accurate speed information to an AUV. This is important when the vehicle is beyond the reach of navigational aids that can only be deployed at or near the surface, such as GNSS or USBL, because the vehicle can navigate autonomously when the velocity estimates are paired with heading estimates.
Nortek’s DVL 1000, which is able to maintain a high degree of accuracy when diving from the surface right down to around 20 cm above the seabed, has proved a good fit for EvoLogics’ AUV prototypes.
It has provided the operational reliability and robustness necessary for robots intended to undertake long and complex missions, as well as offering state-of-the-art technology that integrates well with other instrumentation on board. The DVL’s small size has also been an asset, given the need to pack a lot of equipment into compact AUVs.
“The DVL installed with no issues. We have been satisfied with the performance and we have no issues in operating the device,” adds EvoLogics’ Eugen Olenew.




